Dispositivo robotico miniaturizzato applicabile ad un endoscopio flessibile per la dissezione chirurgica di neoplasie superficiali del tratto gastro-intestinale
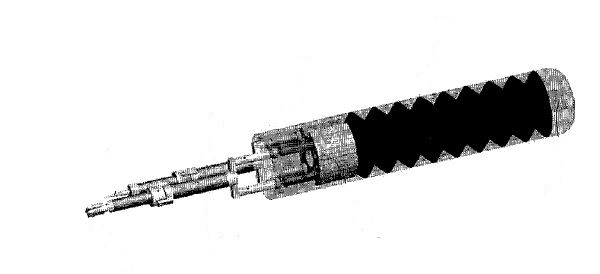
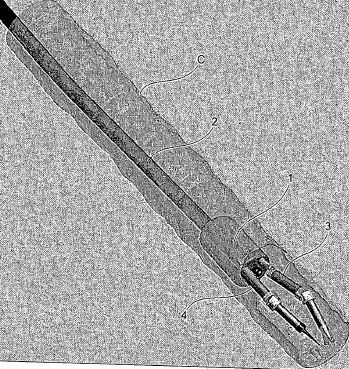
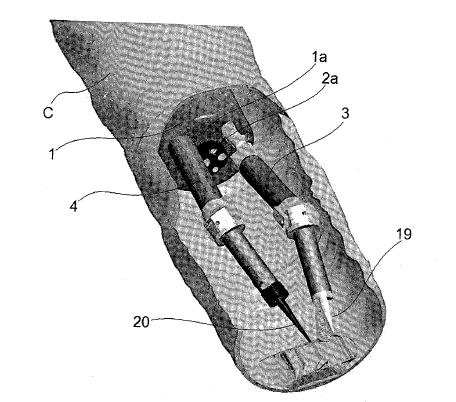
La presente invenzione riguarda un dispositivo robotico miniaturizzato plug&play nel campo della chirurgia mininvasiva, per la dissezione di neoplasie precoci (che non invadono lo spessore della sottomucosa) del tratto grasto-intestinale. In particolare tale dispositivo viene applicato sulla punto di un endoscopio ed è compatibile con tutti i tradizionali endoscopi flessibili in commercio. Il dispositivo è costituto da un cappuccio contenente all’interno due bracci robotici: uno dedicato alla manipolazione del tessuto e l’altro alla sua dissezione. Quando la punta dell’endoscopio raggiunge la zona target, un principio di attuazione pneumatica spinge i bracci robotici all’esterno del cappuccio e questi si posizionano in una configurazione idonea per l’intervento chirurgico di dissezione del tessuto lesionato. Ciascun braccio è caratterizzato da tre gradi di libertà, sufficienti per questo tipo di applicazione.
I vantaggi nell’utilizzo di questo dispositivo robotico sono molteplici: è garantita un’alta precisione operativa e la rimozione completa en-block della lesione, è sufficiente una sala endoscopica, il paziente non viene sottoposto ad un intervento chirurgico in anestesia generale ed inoltre si riducono notevolmente i tempi di degenza e quindi i costi generali per la struttura ospedaliera di riferimento.